#include <ControlBlock.h>
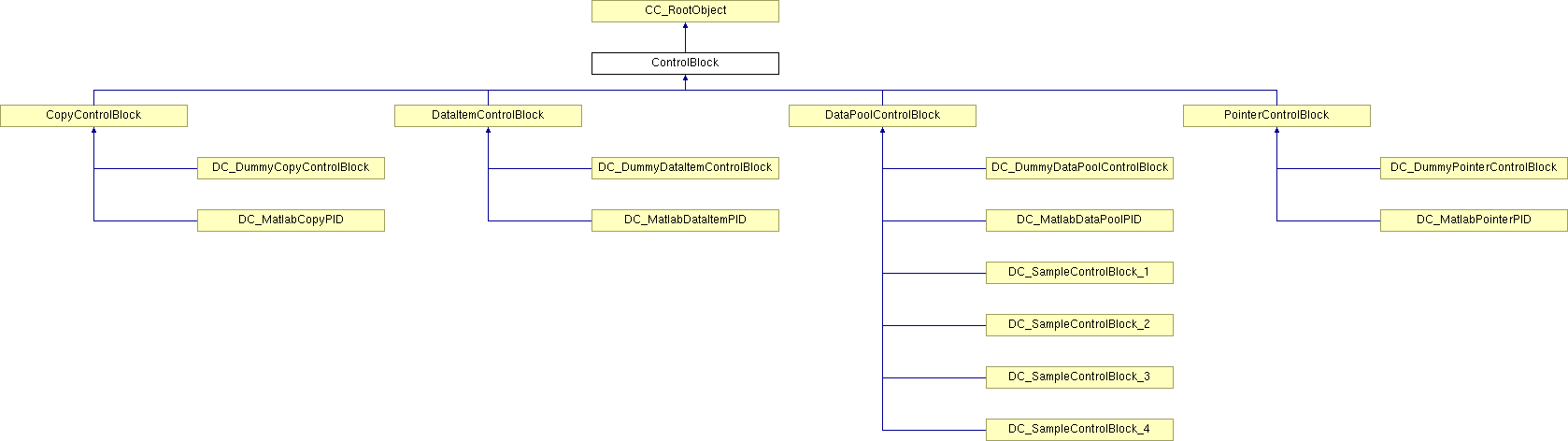
Inheritance diagram for ControlBlock:
A control block is intended to model a discrete transfer function of the following kind
x(k+1) = h( x(k) , u(k), p )
y(k) = g( x(k), u(k), p ) where: DC_DataItem) that encapsulate the input sources and output destinations. The control block then accesses its inputs and outputs through their data items. ControlBlock. This is an abstract class because it defines neither the state propagation and output update functions nor the input and output allocation, setter and getter functions. However it internally defines variables that are intended to make it easy for developers to create concrete classes that implement specific state propagation and output update algorithms. More specifically, this class defines the following items:
protected so as to give subclasses ready and easy access to them. It should be stressed however that there is no obligation on the part of subclasses to use these data structures. If they are subject to special requirements, they are free to implement the state propagation and output update services using class-specific structures. The internal data structures must be configured by the user. Thus, the configuration process for an instance of this class is as follows:
Definition at line 105 of file ControlBlock.h.
Public Member Functions | |
| ControlBlock (void) | |
| Instantiate a control block. | |
| int | getNumberOfOutputs (void) const |
| Return the number of outputs of the control block. | |
| int | getNumberOfStates (void) const |
| Return the number of states of the control block. | |
| int | getNumberOfInputs (void) const |
| Return the number of inputs of the control block. | |
| int | getNumberOfParameters (void) const |
| Return the number of parameters of the control block. | |
| TD_Float | getState (unsigned int i) const |
| Return the value of the i-th state. | |
| TD_Float | getParameter (unsigned int i) const |
| Return the value of the i-th parameter. | |
| void | setState (unsigned int i, TD_Float newValue) |
| Set the value of the i-th state. | |
| void | setParameter (unsigned int i, TD_Float newValue) |
| Set the value of the i-th parameter. | |
| virtual void | propagate (void) |
| Propagate the input values updating the state variables and the outputs. | |
| virtual void | reset (void) |
| Reset the control block bringing its state back to the value they had when the configuration process of the control block was terminated. | |
| virtual bool | isObjectConfigured (void) |
| Perform a class-specific configuration check on a control block. | |
Protected Member Functions | |
| virtual void | setNumberOfInputs (unsigned int n)=0 |
| Set the number of inputs and, if required, allocate the necessary storage. | |
| virtual void | setNumberOfOutputs (unsigned int n)=0 |
| Set the number of outputs and, if required, allocate the necessary storage. | |
| void | setNumberOfStates (unsigned int n) |
| Set the number of states. | |
| void | setNumberOfParameters (unsigned int n) |
| Set the number of parameters. | |
| virtual void | propagateState (void)=0 |
| Implement the state propagation function. | |
| virtual void | updateOutput (void)=0 |
| Implement the output update function. | |
Protected Attributes | |
| int | nInputs |
| Number of inputs. | |
| int | nOutputs |
| Number of outputs. | |
| int | nStates |
| Number of state variables. | |
| int | nParameters |
| Number of parameters. | |
| TD_Float * | x |
| Array to hold the state variables. | |
| TD_Float * | p |
| Array to hold the parameter variables. | |
|
|
Instantiate a control block. The number of inputs, outputs, states and parameters is initialized with illegal values to signify that the component is not yet configured. Definition at line 17 of file ControlBlock.cpp. |
|
|
Return the number of inputs of the control block.
Definition at line 36 of file ControlBlock_inl.h. |
|
|
Return the number of outputs of the control block.
Definition at line 30 of file ControlBlock_inl.h. |
|
|
Return the number of parameters of the control block.
Definition at line 48 of file ControlBlock_inl.h. |
|
|
Return the number of states of the control block.
Definition at line 42 of file ControlBlock_inl.h. |
|
|
Return the value of the i-th parameter. The argument i must lie in the interval [0,n-1] where n is the number of parameters. No check is performed on the legality of the index i.
Definition at line 24 of file ControlBlock_inl.h. |
|
|
Return the value of the i-th state. The argument i must lie in the interval [0,n-1] where n is the number of states. No check is performed on the legality of the index i.
Definition at line 18 of file ControlBlock_inl.h. |
|
|
Perform a class-specific configuration check on a control block. It is checked that the number of inputs, outputs, states and parameters have been set to legal values. Reimplemented from CC_RootObject. Reimplemented in DataItemControlBlock, DataPoolControlBlock, and PointerControlBlock. Definition at line 76 of file ControlBlock.cpp. |
|
|
Propagate the input values updating the state variables and the outputs. This method implements the transfer function encapsulated by the control block. It causes the state variables to be updated to take account of the latest input values and it then uses the new state values to compute a new set of ouptuts. A pseudo-code implementation for this method is as follows:
propagateState();
updateOutput(); Note that methods propagateState and updateOutput are pure virtual methods. Together, they define the transfer function encapsulated by the control block.
This class defines the structure of the propagation cycle. It is defined to be Definition at line 62 of file ControlBlock.cpp. |
|
|
Implement the state propagation function.
The result of calling this method should be a new set of values for the state variables computed as a function of the current input values, the old state values, and the parameter values. Note that the state and parameter values are directly accessible as
Implemented in DC_DummyCopyControlBlock, DC_DummyDataItemControlBlock, DC_DummyDataPoolControlBlock, DC_DummyPointerControlBlock, DC_MatlabCopyPID, DC_MatlabDataItemPID, DC_MatlabDataPoolPID, DC_MatlabPointerPID, DC_SampleControlBlock_1, DC_SampleControlBlock_2, DC_SampleControlBlock_3, and DC_SampleControlBlock_4. |
|
|
Reset the control block bringing its state back to the value they had when the configuration process of the control block was terminated. The default implementation provided by this class resets the state values to zero. Reimplemented in CopyControlBlock, DC_DummyCopyControlBlock, DC_DummyDataItemControlBlock, DC_DummyDataPoolControlBlock, DC_DummyPointerControlBlock, DC_MatlabCopyPID, DC_MatlabDataItemPID, DC_MatlabDataPoolPID, DC_MatlabPointerPID, DC_SampleControlBlock_1, DC_SampleControlBlock_2, DC_SampleControlBlock_3, and DC_SampleControlBlock_4. Definition at line 69 of file ControlBlock.cpp. |
|
|
Set the number of inputs and, if required, allocate the necessary storage. The number of inputs must be non-negative.
Implemented in CopyControlBlock, DataItemControlBlock, DataPoolControlBlock, and PointerControlBlock. |
|
|
Set the number of outputs and, if required, allocate the necessary storage. The number of inputs must be non-negative.
Implemented in CopyControlBlock, DataItemControlBlock, DataPoolControlBlock, and PointerControlBlock. |
|
|
Set the number of parameters. This method causes the memory for the parameter array to be allocated. The number of parameters must be non-negative. The parameter values are initialized to zero. This is an initialization method: it shall be called only once.
Definition at line 35 of file ControlBlock.cpp. |
|
|
Set the number of states. This method causes the memory for the state array to be allocated. The number of states must be non-negative. The state values are initialized to zero. This is an initialization method: it shall be called only once.
Definition at line 26 of file ControlBlock.cpp. |
|
||||||||||||
|
Set the value of the i-th parameter. The argument i must lie in the interval [0,n-1] where n is the number of parameters. Illegal argument values trigger the generation of an event report EVT_ILLEGAL_CB.
Definition at line 53 of file ControlBlock.cpp. |
|
||||||||||||
|
Set the value of the i-th state. The argument i must lie in the interval [0,n-1] where n is the number of states. Illegal argument values trigger the generation of an event report EVT_ILLEGAL_CB. This method should not normally be used since the state values are internally computed by propagating the input and the previous state values. It is provided for the (non-nominal) case where there is a need to overwrite the internally computed state.
Definition at line 44 of file ControlBlock.cpp. |
|
|
Implement the output update function.
This method uses the current values of the inputs and state variables to compute and apply new values for the outputs. Note that the input, state and parameter values are directly accessible as
Implemented in DC_DummyCopyControlBlock, DC_DummyDataItemControlBlock, DC_DummyDataPoolControlBlock, DC_DummyPointerControlBlock, DC_MatlabCopyPID, DC_MatlabDataItemPID, DC_MatlabDataPoolPID, DC_MatlabPointerPID, DC_SampleControlBlock_1, DC_SampleControlBlock_2, DC_SampleControlBlock_3, and DC_SampleControlBlock_4. |
|
|
Array to hold the parameter variables. p[i] holds the i-th state variable with i in the interval [0,N-1] where N is the number of parameters.
Definition at line 141 of file ControlBlock.h. |
|
|
Array to hold the state variables. x[i] holds the i-th state variable with i in the interval [0,N] where N is the number of states.
Definition at line 133 of file ControlBlock.h. |